
Principal curvature

In differential geometry, the two principal curvatures at a given point of a surface are the maximum and minimum values of the curvature as expressed by the eigenvalues of the shape operator at that point. They measure how the surface bends by different amounts in different directions at that point.
Discussion
[edit]At each point p of a differentiable surface in 3-dimensional Euclidean space one may choose a unit normal vector. A normal plane at p is one that contains the normal vector, and will therefore also contain a unique direction tangent to the surface and cut the surface in a plane curve, called normal section. This curve will in general have different curvatures for different normal planes at p. The principal curvatures at p, denoted k1 and k2, are the maximum and minimum values of this curvature.
Here the curvature of a curve is by definition the reciprocal of the radius of the osculating circle. The curvature is taken to be positive if the curve turns in the same direction as the surface's chosen normal, and otherwise negative. The directions in the normal plane where the curvature takes its maximum and minimum values are always perpendicular, if k1 does not equal k2, a result of Euler (1760), and are called principal directions. From a modern perspective, this theorem follows from the spectral theorem because these directions are as the principal axes of a symmetric tensor—the second fundamental form. A systematic analysis of the principal curvatures and principal directions was undertaken by Gaston Darboux, using Darboux frames.
The product k1k2 of the two principal curvatures is the Gaussian curvature, K, and the average (k1 + k2)/2 is the mean curvature, H.
If at least one of the principal curvatures is zero at every point, then the Gaussian curvature will be 0 and the surface is a developable surface. For a minimal surface, the mean curvature is zero at every point.
Formal definition
[edit]Let M be a surface in Euclidean space with second fundamental form . Fix a point p ∈ M, and an orthonormal basis X1, X2 of tangent vectors at p. Then the principal curvatures are the eigenvalues of the symmetric matrix

![{\displaystyle \left[I\!I_{ij}\right]={\begin{bmatrix}I\!I(X_{1},X_{1})&I\!I(X_{1},X_{2})\\I\!I(X_{2},X_{1})&I\!I(X_{2},X_{2})\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8bffd43b323463adccee7129a8191ca0ad70344b)
If X1 and X2 are selected so that the matrix is a diagonal matrix, then they are called the principal directions. If the surface is oriented, then one often requires that the pair (X1, X2) be positively oriented with respect to the given orientation.
![{\displaystyle \left[I\!I_{ij}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2c25a532dc99d4e755b582b3e013b0c91c449144)
Without reference to a particular orthonormal basis, the principal curvatures are the eigenvalues of the shape operator, and the principal directions are its eigenvectors.
Generalizations
[edit]For hypersurfaces in higher-dimensional Euclidean spaces, the principal curvatures may be defined in a directly analogous fashion. The principal curvatures are the eigenvalues of the matrix of the second fundamental form in an orthonormal basis of the tangent space. The principal directions are the corresponding eigenvectors.

Similarly, if M is a hypersurface in a Riemannian manifold N, then the principal curvatures are the eigenvalues of its second-fundamental form. If k1, ..., kn are the n principal curvatures at a point p ∈ M and X1, ..., Xn are corresponding orthonormal eigenvectors (principal directions), then the sectional curvature of M at p is given by

for all with .


Classification of points on a surface
[edit]- At elliptical points, both principal curvatures have the same sign, and the surface is locally convex.
- At umbilic points, both principal curvatures are equal and every tangent vector can be considered a principal direction. These typically occur in isolated points.
- At hyperbolic points, the principal curvatures have opposite signs, and the surface will be locally saddle shaped.
- At parabolic points, one of the principal curvatures is zero. Parabolic points generally lie in a curve separating elliptical and hyperbolic regions.
- At flat umbilic points both principal curvatures are zero. A generic surface will not contain flat umbilic points. The monkey saddle is one surface with an isolated flat umbilic.
| k1 | ||||
|---|---|---|---|---|
| < 0 | = 0 | > 0 | ||
| k2 | < 0 | Concave ellipsoid | Concave cylinder | Hyperboloid surface |
| = 0 | Concave cylinder | Plane | Convex cylinder | |
| > 0 | Hyperboloid surface | Convex cylinder | Convex ellipsoid | |
Line of curvature
[edit]The lines of curvature or curvature lines are curves which are always tangent to a principal direction (they are integral curves for the principal direction fields). There will be two lines of curvature through each non-umbilic point and the lines will cross at right angles.
In the vicinity of an umbilic the lines of curvature typically form one of three configurations star, lemon and monstar (derived from lemon-star).[2] These points are also called Darbouxian Umbilics (D1, D2, D3) in honor of Gaston Darboux, the first to make a systematic study in Vol. 4, p 455, of his Leçons (1896).
- Configurations of lines of curvature near umbilics
-
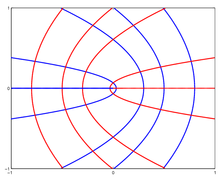 Lemon - D1
Lemon - D1 -
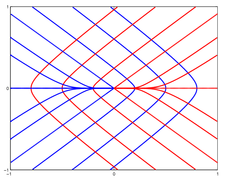 Monstar - D2
Monstar - D2 -
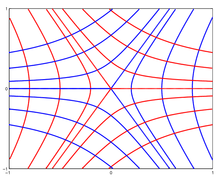 Star - D3
Star - D3



In these figures, the red curves are the lines of curvature for one family of principal directions, and the blue curves for the other.
When a line of curvature has a local extremum of the same principal curvature then the curve has a ridge point. These ridge points form curves on the surface called ridges. The ridge curves pass through the umbilics. For the star pattern either 3 or 1 ridge line pass through the umbilic, for the monstar and lemon only one ridge passes through.[3]
Applications
[edit]Principal curvature directions along with the surface normal, define a 3D orientation frame at a surface point. For example, in case of a cylindrical surface, by physically touching or visually observing, we know that along one specific direction the surface is flat (parallel to the axis of the cylinder) and hence take note of the orientation of the surface. The implication of such an orientation frame at each surface point means any rotation of the surfaces over time can be determined simply by considering the change in the corresponding orientation frames. This has resulted in single surface point motion estimation and segmentation algorithms in computer vision.[4]
See also
[edit]References
[edit]- ^ Surface Curvature
- ^ Berry, M. V.; Hannay, J. H. (1977). "Umbilic points on Gaussian random surfaces". Journal of Physics A. 10 (11): 1809–21. Bibcode:1977JPhA...10.1809B. doi:10.1088/0305-4470/10/11/009. S2CID 55230556.
- ^ Porteous, I. R. (1994). Geometric Differentiation. Cambridge University Press. ISBN 0-521-39063-X.
- ^ Perera, S.; Barnes, N. (November 2013). "1-Point Rigid Motion Estimation and Segmentation with a RGB-D Camera". 2013 International Conference on Digital Image Computing: Techniques and Applications (DICTA). pp. 1–8. doi:10.1109/DICTA.2013.6691469. ISBN 978-1-4799-2126-3. S2CID 15915653.
Further reading
[edit]- Darboux, Gaston (1896) [1887]. Leçons sur la théorie génerale des surfaces. Gauthier-Villars.
- Guggenheimer, Heinrich (1977). "Chapter 10. Surfaces". Differential Geometry. Dover. ISBN 0-486-63433-7.
- Kobayashi, Shoshichi & Nomizu, Katsumi (1996). Foundations of Differential Geometry, Vol. 2 (New ed.). Wiley-Interscience. ISBN 0-471-15732-5.
- Spivak, Michael (1999). A Comprehensive introduction to differential geometry (Volume 3). Publish or Perish. ISBN 0-914098-72-1.
- Sotomayor, J. (1993). "O elipsóide de Monge" (PDF). Revista Matemática Universitária. 15: 33–47.
- Sotomayor, J. (2007). "El elipsoide de Monge y las líneas de curvatura". Materials Matemàtics. 01: 1–25.